Boubrima and Knightly Win Best Paper Award at ACM DroNet
The paper “Robust Mission Planning of UAV Networks for Environmental Sensing,” authored by Ahmed Boubrima and Edward Knightly was awarded the best paper award at ACM DroNet 2020.
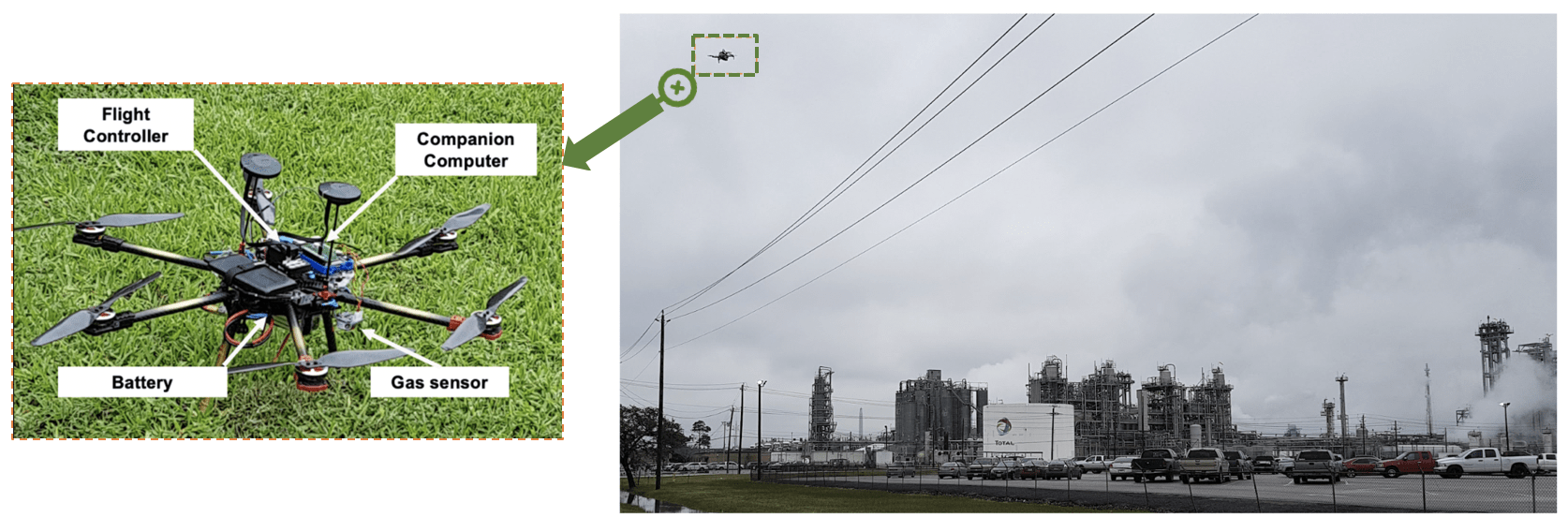
Part of the ASTRO project, in this paper, the team designed and experimentally validated a robust UAV-based air pollution sensing system that leverages the effects of weather conditions on gas sensing quality. They first demonstrated that the dynamic airflow caused by drones’ propellers affects temperature and humidity levels of the ambient air, which then affect the measurement quality of gas sensors. Then, they leverage this fact in order to provide a heterogeneous-sensing-aware optimization of sensing decisions.